Modelle - digital gesteuert Tipps zur Digitalisierung von Straßenbahnmodellen Dieser Beitrag steht für die private Nutzung uneingeschränkt zur Verfügung, kommerzielle Nutzung, auch auszugsweise, nur mit der schriftlichen Genehmigung des Autors.
Grundsätzliches
Digitale Steuerungssysteme unterscheiden sich von der analogen Modellbahnsteuerung dadurch, daß nicht nur der Strom zum Betrieb des Motors zum Fahrzeug übertragen wird, sondern gleichzeitig auch die Steuerinformationen für den Fahrzeugempfänger. Daraus folgt: Eine gute und vor allem sichere Stromabnahme ist unerlässlich. Ein Zug, der analog schon schlecht fährt, wird digital nicht besser fahren. Räder und Schienen müssen öfter gereinigt werden. Die Fahrzeuge dürfen nicht zu leicht sein. Es sollten generell so viele Achsen wie möglich zur Stromabnahme genutzt werden.
 -Zum Beispiel durch stromführende Kupplungen im Eigenbau- Bei der Beleuchtung von Modellen ist es notwendig, die Beiwagen oder weiteren Triebwagen des Zuges über eine stromführende Kupplung zu versorgen. Alternativ kann auch in jeden Wagen ein Decoder eingebaut werden. Bei nicht angetriebenen Wagen übernimmt diese Funktion ein Funktionsdecoder.
Auswahl des richtigen Digitaldecoders Es gibt inzwischen eine solche Vielzahl an Digitaldecodern, daß der einfache Anwender schon bei der Auswahl des Decoders erhebliche Fehler machen kann. Worauf muß denn nun besonders geachtet werden? Dieser Kurzschlußstrom ist das hauptsächliche Auswahlkriterium für den Digitaldecoder. Wie wird der Kurzschlußstrom gemessen? Erfahrungsgemäß liegt dieser Kurzschlussstrom bei Modellen mit einem Motor unter 500mA. Daraus folgt: Wenn der Motor einen Kurzschlußstrom von 500mA hat, sollte der Decoder für eine Dauerbelastung des Motorausgangs von mindestens 500mA geeignet sein. Da bei Straßenbahnmodellen erfahrungsgemäß wenig Platz für den Decoder vorhanden ist, werden bevorzugt die kleinen Minidecoder für Spur N eingebaut (Achtung! Nur bei einmotorigen Modellen verwenden!) Gute Erfahrungen wurden dabei mit den Mini-Decodern von
Wichtig ist außerdem noch, wieviele Funktionen sollen angesteuert werden und welche. Nicht immer können alle Fabrikate die gewünschten Effekte - wie z.B. blinken, Bremslicht etc.
Vorbereitungen zum Einbau Bevor irgendwelche Arbeiten am Fahrzeug gemacht werden, erst mal die Betriebsanleitung des Decoders lesen!
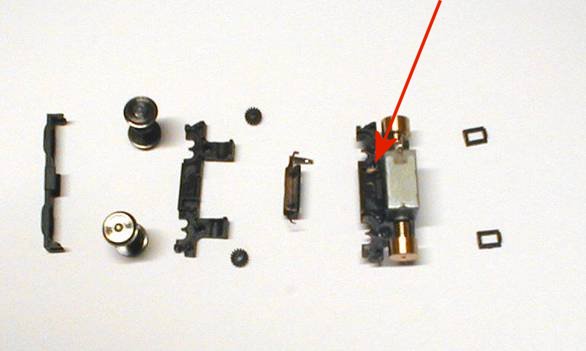
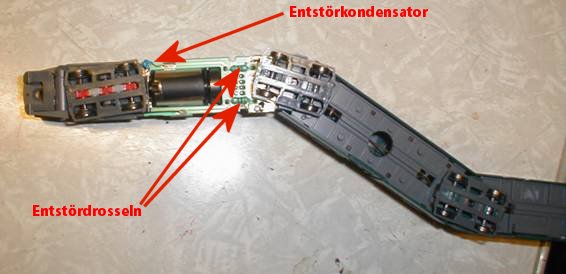
Zerlegter Halling-Vario-Antrieb. Der Pfeil zeigt auf den Enstörkondensator.
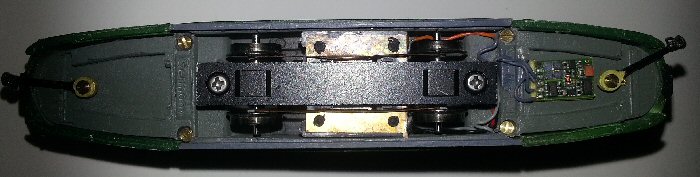
Ansicht der Roco-Straßenbahn von unten.
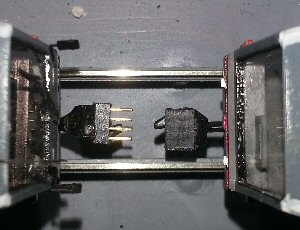
Entstördrosseln, die in Reihe zu den einzelnen Motoranschlüssen eingebaut sind, können eingebaut bleiben. Damit haben wir die wichtigsten Vorbereitungen für den Decodereinbau geschafft. Anschluß des Decoders Decoder für das DCC-System haben international genormte Kabelfarben für die Anschlußkabel. Wenn das Fahrzeug über eine Digital-Schnittstelle verfügt, sollte der Pin 1 auf der Platine markiert sein. 8poliger Stecker nach NEM 652: Pin 1 ist das orange Kabel, dieses wird an den Motorpol angeschlossen, der vorher mit den rechten Radschleifern verbunden war. 6poliger Stecker nach NEM 651: Pin 1 ist das orange Kabel, dieses wird an den Motorpol angeschlossen, der vorher mit den rechten Radschleifern verbunden war. Sollte ein Funktionsausgang als zweiten Pol das Fahrgestell benutzen, sollte das Fahrgestell möglichst mit dem blauen Kabel verbunden werden. Bei einigen Fahrzeugen ist das nicht möglich, weil das Fahrgestell mit den Radschleifern einer Seite verbunden ist (meistens links). Bei einigen Decoderbauarten kann jetzt noch ein einzelnes grünes oder braunes Kabel übrig sein. Dieses Kabel schaltet die Funktion F1. Damit ist der Einbau des Decoders erledigt. Das Fahrzeug kann seine Probefahrt machen. Grundeinstellungen des Decoders Nachdem unser Fahrzeug seine Probefahrt erfolgreich absolviert hat, kommt nun die Feineinstellung des Decoders. CV ist die Abkürzung für Configuration Variable. So ein moderner Decoder kann bis zu 150 und mehr dieser CVs haben, aber wirklich wichtig sind die CVs in der nachfolgenden Liste - die bei allen Fabrikaten weitgehend gleich sind. CV1 ist immer die "kurze" sprich zweistellige Lokadresse, wobei zweistellig in einigen Fällen bis 127 geht. CV2 ist immer die Minimalgeschwindigkeit. Die Einstellung sollte so gewählt sein, daß der Motor bei Fahrstufe 1 gerade eben ruckfrei rund dreht. CV3 ist immer die Anfahrverzögerung. Hier wird eine Zeitvorgabe eingestellt, die der Decoder beim Hochschalten von einer Fahrstufe zur nächsten benutzt, wenn der Fahrtregler schnell aufgedreht wird. Je größer der eingegebene Wert ist, desto langsamer fährt das Fahrzeug an. Wenn der Wert 1 eingegeben wird, reagiert das Fahrzeug direkt auf eine Veränderung der Fahrtreglerstellung. CV4 ist immer die Bremsverzögerung. Vom Prinzip geschieht hier das gleiche wie in CV3, nur beeinflusst der eingegebene Wert die Zeitkonstante beim Herunterschalten von einer Fahrtstufe zur anderen. Vorsicht, der Wert in CV4 beeinflusst auch den Auslauf des Fahrzeugs, wenn der Fahrtregler schnell auf 0 gedreht wird. Je größer der Wert, desto länger der Auslauf! CV5 ist immer die Maximalgeschwindigkeit. Hier besteht die Möglichkeit, zu schnelle Fahrzeuge in der Endgeschwindigkeit zu drosseln, ohne die Anzahl der zur Verfügung stehenden Fahrtstufen zu reduzieren. Zwischen dem Wert in CV5 und dem Wert in CV2 muß immer mindestens die Anzahl der in CV29 ausgewählten Fahrstufen sein. In der Regel wird dort der 28 Fahrtstufen Modus ausgewählt, dementsprechend muß zwischen den Werten von CV2 und CV5 immer eine Differenz von mindestens 28 bestehen. CV29 enthält Einstelldaten zur Konfiguration der Decoder Betriebsparameter. Im Gegensatz zu anderen CVs kann man hier durch gezieltes ein- oder ausschalten von einzelnen Bits bestimmte Betriebsmodi auswählen. Was bewirken die einzelnen Bits in CV29? Bit 0 beeinflusst die Fahrtrichtung. Wenn Bit 0 auf 1 gesetzt wird, fährt das Fahrzeug rückwärts, obwohl die Fahrtrichtungsanzeige auf vorwärts steht. Steht Bit 0 auf 0, dann fährt das Fahrzeug entsprechend der Fahrtrichtungsanzeige. Bit 1 wählt die Anzahl der Fahrtstufen Wenn Bit 1 auf 0 steht, kann das Fahrzeug mit 14 oder 27 Fahrtstufen gefahren werden. Steht Bit 1 auf 1, wird mit 28 Fahrtstufen gefahren. Bit 2 schaltet den Analogmodus ein oder aus. Wenn Bit 2 auf 0 steht, ist der Analogmodus ausgeschaltet. Ist Bit 2 auf 1 gesetzt, ist der Analogmodus eingeschaltet. Hier sollte besser der Analogmodus ausgeschaltet werden, wenn niemals analog gefahren werden soll.. Bit 3 sollte immer 0 sein! Bit 4 ist je nach Hersteller unterschiedlich belegt. Siehe Anleitung des Decoders. Bit 5 Wählt die Art der Fahrzeugadresse aus. Wird Bit 5 auf 1 gesetzt, wird die lange Adresse, die in CV17+18 hinterlegt wurde benutzt. Bit 6 sollte immer 0 sein! Bit 7 sollte immer 0 sein! Achtung, bei Lenz Decodern sind die Bezeichnungen der Bits von 1-8! ( Lenz Bit 1 ist unser Bit 0) Es gibt Decoder, bei denen lassen sich die Bits nicht einzeln setzen. Ein ausgeschaltetes Bit (egal welches) hat immer den Wert 0. Bit 0 = 1 Bit 1 = 2 Bit 2 = 4 Bit 3 = 8 Bit 4 = 16 Bit 5 = 32 Bit 6 = 64 Bit 7 = 128 Wenn ein Bit eingeschaltet werden soll, wird der dazugehörige Wert in CV29 eingetragen. Wenn mehrere Bits gleichzeitig eingeschaltet werden sollen, werden die Werte der entsprechenden Bits addiert und der daraus resultierende Wert in CV29 eingetragen. |